



反馈控制、串级控制、前馈控制是三种基本的控制方案,这三种控制方案中反馈控制是最基本、最重要的控制方案,也是过程控制的基础。当反馈控制的性能不能接受时,会根据干扰的形式选择更快干预的串级控制改进或者提前补偿的前馈控制改进。这两种改进方法的选择准则有很大区别,相对也容易把握。串级控制用于处理控制侧干扰,而前馈控制用于处理过程侧干扰。串级控制不要求扰动可检测,但是要求扰动影响副过程变量,能通过副过程变量的稳定快速克服干扰,而且副回路要比主回路快,否则串级控制的抗扰能力会降低。前馈控制要求扰动可检测并能通过操纵变量的提前动作补偿克服干扰的影响,这就要求扰动不能通过操纵变量的稳定克服,只能通过操纵变量的补偿克服。
但是当过程变量或最终控制元件超过一个时,控制方案设计艺术性很强。不同的控制方案看起来都可以实现控制目标,但是如果考虑不周全,选择不恰当的控制方案很容易导致性能下降,甚至不能投用和导致生产安全事故。例如如图1所示使用冷热水对混合后的水温和水量进行控制,常规的控制方案就是两个单回路。当控制要求和工艺条件发生变化后这样的单回路控制方案有很多隐患,包括:a.热水或冷水压力波动会影响控制性能;b.当调整一个过程变量的设定值时另一个过程变量会波动;c.没有优先级的概念,当热水调节阀饱和后水温会失控,当冷水调节阀饱和后水量会失控。
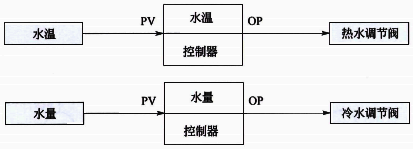
图1 水温水量单回路控制
充分考虑上面的问题并以水温为高优先级过程变量的水温和水量复杂控制如图2所示,控制方案有:a、使用流量副回路克服调节阀非线性和控制侧扰动;b、在水量设定值调整修改冷水时,通过比值控制实现热水流量的等比例调节,既克服对水温的影响,也改善水量的调节速度;c、通过阀位控制器,当热水调节阀全开水温控制可能失控时,重置水量设定值保证水温的可控性。
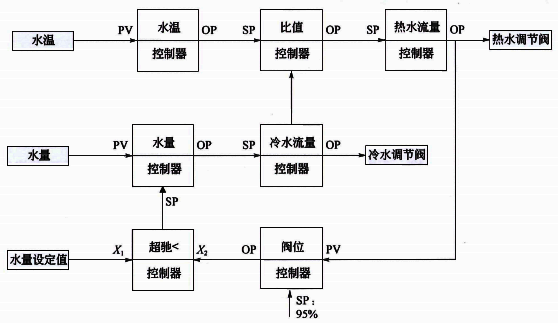
图2 水温水量复杂控制
工艺条件和控制要求决定控制方案设计。虽然操纵变量和被控变量不改变,但是当控制目标、优先级不同时,上述的复杂控制方案需要相应修改。这里昌晖仪表和大家讨论使用两类控制策略设计的案例,方便大家借鉴。
1、一个测量值两个最终控制元件
当存在一个测量值和两个最终控制元件时,典型的控制方案是分程控制。但是实际上这种场景下还有多种控制方案可以选择。可能的控制方案包括:a、分级控制;b、分程控制;c、分配控制;d、阀位控制。
图3所示的前系统压力首先使用往后系统去的调节阀进行控制,如果前系统气量太大超过了后系统的处理能力,则可以考虑放空,所以前系统压力采用了两个具有不同设定值的单回路分级控制方案。在正常情况下,PIC1控制器控制流向下游单元的调节阀,因为压力低于PIC2控制器的设定值,所以放空阀门完全关闭。如果气体流量变大,通向后系统的阀门就会完全打开。如果气体流量仍然大于流向后系统的最大流量,则压力将增加到PIC1的设定值以上。如果大流量保持足够长的一段时间,压力会超过具有更高设定值的控制器PIC2的设定值,此时PIC2控制器开始增加放空阀门开度以保证安全。

图3 气相压力控制方案
分级设计使用压力缓冲,所以在流向下游单元的流量达到最大值和压力超过PIC2的设定值之前没有放空。因此,在短期干扰可能导致压力上升时不会马上被放空。使用两个控制器允许对两个控制器回路单独整定。
两个回路设定值应保持足够差值,防止两个控制回路耦合振荡。两个控制回路应该选择不同的期望闭环时间常数,经常使用的控制回路的PID可以正常整定,不经常使用的控制回路要整定得弱一些。另外,在实际使用中当压力快速变化时,由于比例作用,两个控制回路输出可能出现PIC1的控制器输出还没有完全打开同时PIC2的控制器输出已经打开的情况,所以PIC2的PID参数需要仔细斟酌,如果控制系统有合适的变增益PID,使用变增益PID也是非常好的方法。
放空调节阀控制压力只有出现异常状况才触发,这样的控制方案设计使两个控制回路单独整定。如果工艺过程能够接受两个回路设定值偏差可能引起的压力波动,而且绝大多数情况下都只需要PIC1控制器工作,分级控制就是一种合理的控制方案。大流量保持足够长的一段时间,稍高但是安全的控制器PIC2设定值可以充分发挥缓冲效果,从这个角度看分程控制不是合理控制方案。
如果在不同工况下需要交替使用不同的最终控制元件,分程控制往往是首选。例如如图4所示的储罐压力分程控制方案,储罐在压力不足时补充氮气,当压力超高时放空。虽然交替使用不同最终控制元件,但如果允许压力在一定范围内波动时,使用两个具有不同设定值的单回路分级控制方案也可以考虑。夜晚温度低,储罐压力偏低,使用分程控制就会补充氮气,白天温度上升,储罐压力升高则需要放空。如果储罐在夜晚允许比正常稍低的压力而不补充氮气,白天允许比正常稍高的压力则放空也会减少,有助于减少排放。

图4 储罐压力分程控制方案
相反,如果是反应器温度控制,不同工况需要交替使用冷热介质,而且温度要求严格控制,则分程控制是首选方案。
有时候两个最终控制元件实际上是一主一备的关系,这时候很多地方也把控制方案设计为两个控制回路。这种情况下设计成两个控制回路是错误的,因为两个控制回路的设定值一样,两个控制回路同时投用时控制回路的互相影响不可避免,此时如果想通过PID参数整定克服耦合也是用一个错误纠正另一个错误。正确的控制方案如图5所示:把控制器的相同输出同时送到两个最终控制元件,也就是分配控制方案。这种控制方案可以任意选择一个最终控制元件进行控制,甚至可以同时使用两个最终控制元件,主阀和备阀的输出与控制器输出都完全重合。分配控制也可以理解为特殊的分程控制。
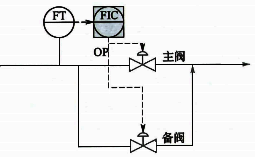
图5分配控制方案
两个控制回路的设计还会导致只有一个控制回路能切换到自动模式,装置的自控率也会受影响。
如果两个最终控制元件对过程变量的影响在快速性、有效性或经济性上有所不同,则需要充分利用自由度进行控制和协调优化,此时阀位控制才是正确的控制方案。
图6所示为大小阀流量控制方案。为了保证控制精度,流量控制必须选择小阀进行控制,但是小阀不能保证在更大范围流量的充分可控,因此必须使用大阀进行可控性补充,即用大阀来保证小阀始终可调节。简单说小阀是控制过程变量的必要性手段,大阀是过程变量可控性补充。这就是大小阀流量控制时采用阀位控制系统的主要目的。

图6 大小阀流量控制方案
阀位控制系统既提供了更大的可调范围,还提供了小阀的灵敏度。当仅使用大阀进行控制时控制系统灵敏度不足,而使用分程控制则无法满足高要求。阀位控制系统还消除了分程控制的不连续性。这种情况设计成分程控制或者两个单回路是工业现场常犯的控制方案设计错误。
2、两个测量值一个最终控制元件
当存在两个测量值一个最终控制元件时,也有多种可能的控制方案,包括:a、串级控制;b、前馈-反馈控制;c、超驰控制;d、单闭环比值控制等。
串级控制是通过嵌套控制回路来建立的。当有两个过程变量和一个最终控制元件时,可以采用串级控制。通过使用对控制输出响应更快的中间过程变量,可以实现主过程变量的更精准控制。当最终控制元件和主过程变量之间存在显著动态,例如,大纯滞后时间或大时间常数时,串级控制尤其有用。这种方法主要用于解决控制侧干扰。例如在图7所示的加热炉出口温度串级控制中,燃料流量控制回路可以快速抑制燃料气压力波动对加热炉出口温度的影响,并克服最终控制元件的非线性。
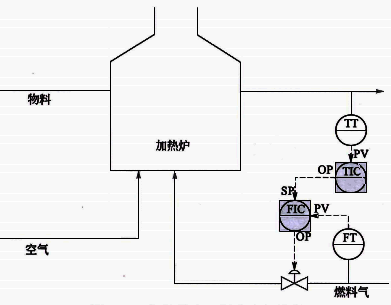
图7 加热炉出口温度串级控制
如果干扰来自过程侧而且可以检测,同时干扰到过程变量的动态特性和控制器输出到过程变量的动态特性接近,则可以考虑静态前馈控制。当两者的动态特性差异很大时,则要慎重使用前馈控制,使用动态前馈往往由于复杂性和鲁棒性而实现不了预期效果。
在图8所示的换热器出口温度控制方案中,如果没有前馈控制,当物料流量发生变化时会引起换热器出口温度波动,通过使用前馈可以在过程物料流量变化时及时调节加热蒸汽调节阀,从而克服过程物料流量干扰对出口温度的影响。如果换热器出口温度的控制品质仍达不到控制要求,则可以考虑使用更多过程变量的前馈串级组合控制。
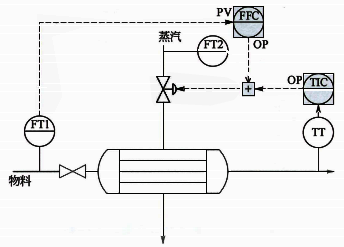
图8 换热器出口温度前馈控制
如果干扰可以通过操纵变量更平稳克服则选择串级控制,如果干扰要通过操纵变量提前补偿克服则可使用前馈控制,如果两种情况都需要考虑,可以使用前馈串级组合控制策略。串级控制和前馈控制的适用情况显著不同,很容易做出正确选择,串级控制用于处理控制侧干扰而前馈控制用于处理过程侧干扰。
当需要对两个过程变量同时进行控制时,超驰控制也是一个可行的方案。超驰控制系统中,只有一个最终控制元件,但是有两个过程变量,其中一个常规的过程变量要求一直维持在其设定值,另一个约束过程变量要求维持在一定的操作范围以确保安全。超驰控制策略使用两个或多个控制器,允许一个控制器采取行动来维持或控制一个过程变量(主控制器),而其他控制器监视别的过程变量(约束变量),如果超出约束,则通过选择器选择。
在压缩机出口流量控制中,一般使用压缩机转速(控制器输出)和压缩机出口流量(过程变量)的简单控制回路就可以实现。但是有时候为了保证前后工段生产负荷均衡,压缩机所输送的气量不能超过前面工段提供的气量,尤其要防止排气量过大,造成抽空吸入空气而发生爆炸。所以必要时可以把压缩机入口压力和流量结合在一起,设计成如图9所示的超驰控制系统。
图9 压缩机出口流量超驰控制
正常生产时,流量控制系统工作,压缩机通过控制压缩机转速控制输送气量,如果前面工序负荷降低,而造成入口压力下降,压力控制系统通过低选器自动切上去,把压缩机转速减下来,以保证压缩机入口压力不会过低,防止被抽空。
有时候需要让两个过程变量的绝对量保持固定比例,这时图10所示的单闭环比值控制就是标准解决方案。单闭环比值控制系统中,只有一个最终控制元件,两个过程变量中一个无法控制的过程变量称为主过程变量,另一个称为从过程变量。从过程变量和最终控制元件组成单回路,并串级接收由主过程变量乘比率得到的设定值。比值控制是自动前馈控制在实际中单独应用的主要形式。

图10 单闭环比值控制系统